Visual Robotic Arm Challenge"Visual Robotic Arm Challenge" competition item (Total time: / hour) Task book
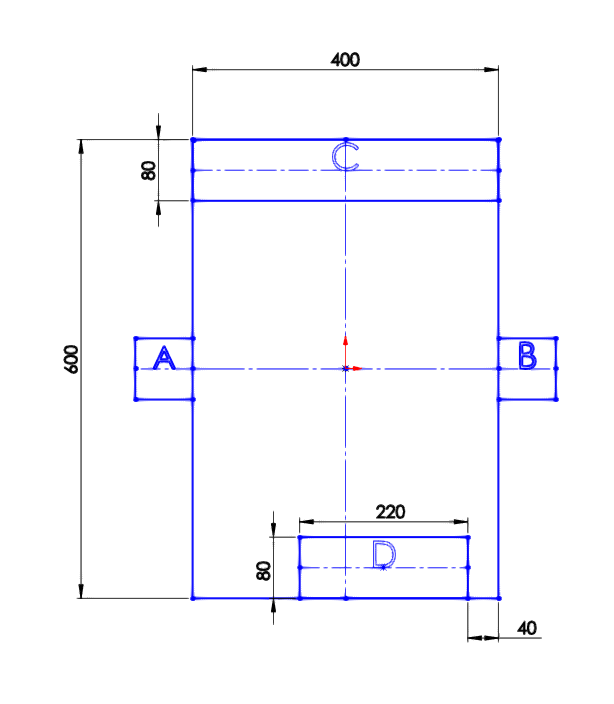
Task specification 1. Combine the technical requirements of the competition and the task specifications of this competition to complete the designated tasks. 2. The workstation must be combined with a horizontal multi-joint palletizing robot and auxiliary equipment. 3. Technical requirements for this competition: (1) Application of machine vision technology. (2) Application of steering gear control technology. (3) Application of stepper motor control technology. (4) Apply Arduino single-chip control technology. 4. The maximum working range of the main working robot cannot exceed 430mm. 5. The longest length of auxiliary equipment cannot exceed 500mm. 6. The structure of the horizontal multi-joint palletizing robot is stable and there is no unreasonable shaking. 7. The voltage of a single power supply cannot exceed 12V, and the power cannot exceed 400W. 8. Machine vision uses the designated equipment OpenMV. 9. The control board uses the designated equipment MENSAORCB1 Zhuo Ao Technology Cooperation Model. 10. Self-provided debugging and assembly tools (computer, power strip, and hardware tools). 11. The material is an electronic module within 40mm*40mm*40mm. 12. All equipment components of the competition shall not exceed the range shown in the working area diagram. 13. No points will be awarded if the above requirements are not met. 1.Introduction to the competition and task requirements 1. Introduction to the competition: This competition is based on the visual recognition system, and realizes the recognition and operation of materials through program-controlled robots. It mainly examines the contestants' machine vision, steering gear control, stepper motor control, and Arduino microcontroller control technology. Participants collaborate to complete tasks 1, 2, 3. 2. Task requirements: Task 1 (60 points): Phase 1: At the beginning of the task, the robot starts at the origin and scans area C to detect materials, finds the materials, collects information, and returns to the origin to reset after the information is collected. Stage 2: Scan area C again to identify the materials. At this time, the materials that have collected information and interfering materials are placed in area C, and the materials that collect information are placed in area D (only one material is collected, and the material is an electronic module such as a wireless receiving module, Ultrasonic module, etc., the interference materials can be different electronic modules). Task 2 (30 points): Conceive a task 1 innovation point in any process and realize it. Task 3 (10 points): The task report is written in Word, which describes in detail the project design ideas, the principle of program realization, and the advantages and disadvantages of the program. If there is any innovation, please describe the creative characteristics and realization principle in detail. 3. Scoring basis The referee will give points based on the completion of tasks 1, 2, and 3. Material 1: Participants are asked to record the tasks of the competition into a video (tasks 1 and 2). The video must be accompanied by explanations or text explanations that outline the task process. The video format is mp4 and the file is not larger than 500m. Material 2: Task report (Task 3). Material 3: The best program of the competition. Pack the above materials and send them to the mailbox 1148372330@qq.com 4. Working area map (unit: mm)::
|